Conectando motores ao Arduino usando o L293D
Agora é hora de conectar o driver do motor L293D a um Arduino e controlar alguns motores!
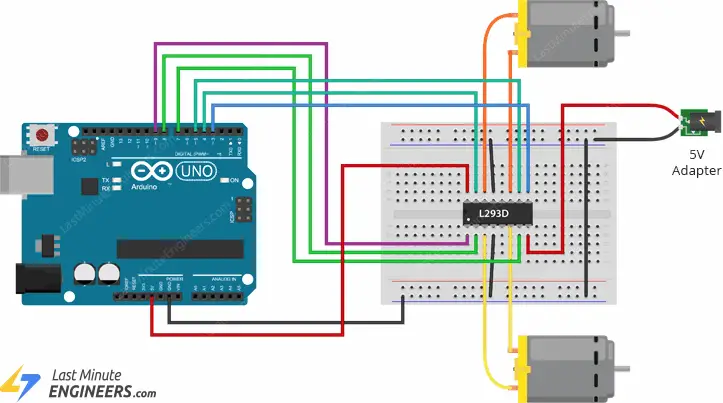
Começaremos conectando a energia aos motores. Neste experimento, estamos usando motores TT, comumente usados em robôs com tração em duas rodas. Esses motores geralmente funcionam bem com tensões entre 3 V e 6 V. Como usaremos uma fonte de alimentação externa de 5 V para nossos motores, precisamos conectar esses 5 V ao pino VS (VCC2) do L293D.
Em seguida, precisamos alimentar o circuito lógico dentro do L293D. Para isso, conectaremos o pino VSS (VCC1) ao pino de saída de 5 V do Arduino.
Além disso, é muito importante garantir que tudo compartilhe um aterramento comum; isso significa conectar um pino de aterramento do seu Arduino a uma conexão de aterramento na fonte de alimentação do seu motor externo e também conectar o pino GND do L293D ao aterramento do Arduino.
Uma vez feitas as conexões de energia, podemos conectar os pinos de controle. O L293D possui dois pinos de habilitação (ENA e ENB) e quatro pinos de entrada (IN1, IN2, IN3 e IN4). Conectaremos ENA ao pino 9 do Arduino, IN1 ao pino 8, IN2 ao pino 7, IN3 ao pino 5, IN4 ao pino 4 e ENB ao pino 3.
Tips
Vale a pena notar que os pinos 9 e 3 no Arduino são habilitados para PWM, o que significa que podemos usá-los mais tarde para controlar a velocidade dos motores usando PWM.
Por fim, conectaremos nossos motores. Pegue um motor e conecte seus dois fios aos pinos OUT1 e OUT2 do L293D. Em seguida, conecte o segundo motor aos pinos OUT3 e OUT4. Não se preocupe muito com qual fio vai para qual pino de saída do motor; você pode trocá-los se o motor girar na direção oposta à esperada, pois não existe uma maneira única "certa" ou "errada" de conectá-los.
Aqui está uma tabela de referência rápida para as conexões dos pinos:
| Pino L293D | Conexão Arduino |
|---|---|
| GND | GND |
| ENA | 9 |
| IN1 | 8 |
| IN2 | 7 |
| IN3 | 5 |
| IN4 | 4 |
| ENB | 3 |
A imagem abaixo mostra o diagrama de fiação completo para esta configuração.
Código de exemplo do Arduino
Aqui está um esboço simples do Arduino que mostra como controlar a direção e a velocidade de dois motores CC usando o driver de motor L293D e um Arduino. Você não precisa de nenhuma biblioteca especial para este esboço; ele usa apenas as funções básicas integradas do IDE do Arduino.
Este exemplo é uma ótima maneira de adquirir experiência prática com o L293D para controlar a velocidade e a direção de motores. Depois de entender isso, você poderá construir facilmente sistemas de controle de motores mais complexos, como os usados em robôs básicos ou carros de controle remoto.
// Motor A connections
int enA = 9;
int in1 = 8;
int in2 = 7;
// Motor B connections
int enB = 3;
int in3 = 5;
int in4 = 4;
void setup() {
// Set all the motor control pins to outputs
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
// Turn off motors - Initial state
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void loop() {
directionControl();
delay(1000);
speedControl();
delay(1000);
}
// This function lets you control spinning direction of motors
void directionControl() {
// Set motors to maximum speed
digitalWrite(enA, HIGH);
digitalWrite(enB, HIGH);
// Turn on motor A & B
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
delay(2000);
// Now change motor directions
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
delay(2000);
// Turn off motors
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
// This function lets you control speed of the motors
void speedControl() {
// Turn on motors
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// Accelerate from zero to maximum speed
for (int i = 0; i < 256; i++) {
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// Decelerate from maximum speed to zero
for (int i = 255; i >= 0; --i) {
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// Now turn off motors
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}Info
Ao acelerar ou desacelerar um motor CC, você pode ouvir um zumbido, especialmente em valores de PWM mais baixos. Não se preocupe — isso é completamente normal. Isso acontece porque os motores CC precisam de uma certa quantidade mínima de tensão para começar a girar e, em valores de PWM baixos, a tensão pode não ser alta o suficiente para manter o motor funcionando sem problemas.
Explicação do código
No início do esboço, definimos quais pinos do Arduino serão usados para controlar o Motor A e o Motor B. Para o Motor A, temos um pino para habilitá-lo (permitindo-nos controlar sua velocidade com PWM) e dois pinos para controle de direção. Da mesma forma, para o Motor B, temos um pino de habilitação e dois pinos de controle de direção.
// Motor A connections
int enA = 9;
int in1 = 8;
int in2 = 7;
// Motor B connections
int enB = 3;
int in3 = 5;
int in4 = 4;Na função setup(), configuramos todos os seis pinos de controle do motor como saídas, pois estamos enviando sinais do Arduino para o L293D. Também garantimos que ambos os motores estejam desligados, configurando todos os pinos de controle de direção para LOW. Isso garante que os motores não comecem a girar repentinamente quando o Arduino for ligado.
void setup() {
// Set all the motor control pins to outputs
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
// Turn off motors - Initial state
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}Na função loop(), chamamos duas funções personalizadas com um intervalo de um segundo entre elas. A primeira função é directionControl(), e a segunda é speedControl().
void loop() {
directionControl();
delay(1000);
speedControl();
delay(1000);
}Vamos analisar o que cada uma dessas funções faz.
A função directionControl() demonstra como controlar a direção de ambos os motores. Primeiro, ajustamos ambos os motores à velocidade máxima possível, configurando ambos os pinos de habilitação em nível ALTO. Em seguida, enviamos os sinais necessários aos pinos de controle de direção para fazer com que os motores A e B girem para frente. Após girarem nessa direção por dois segundos, transferimos os sinais para seus pinos de direção, o que faz com que ambos os motores invertam a direção de rotação por mais dois segundos. Por fim, paramos os motores configurando todos os pinos de controle de direção em nível BAIXO.
void directionControl() {
// Set motors to maximum speed
digitalWrite(enA, HIGH);
digitalWrite(enB, HIGH);
// Turn on motor A & B
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
delay(2000);
// Now change motor directions
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
delay(2000);
// Turn off motors
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}A função speedControl() demonstra como controlar a velocidade dos motores usando PWM. Começamos configurando os pinos de controle de direção para que ambos os motores girem na mesma direção. Em seguida, aumentamos lentamente a velocidade do motor, elevando gradualmente o valor de PWM de 0 a 255. Isso simula um efeito de aceleração. Assim que os motores atingem a velocidade máxima, invertemos o processo — diminuindo lentamente o valor de PWM de 255 para 0, o que faz com que os motores diminuam gradualmente a velocidade e parem. Por fim, paramos os motores configurando todos os pinos de controle de direção para BAIXO.
void speedControl() {
// Turn on motors
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// Accelerate from zero to maximum speed
for (int i = 0; i < 256; i++) {
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// Decelerate from maximum speed to zero
for (int i = 255; i >= 0; --i) {
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// Now turn off motors
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}