Como conectar o Sensor Ultrassônico HC-SR04 ao Arduino
O Sensor Ultrassônico HC-SR04 é um componente muito comum em projetos com Arduino, e permite que você faça leituras de distâncias entre 2 cm e 4 metros, com precisão de 3 mm. Pode ser utilizado simplesmente para medir a distância entre o sensor e um objeto, como para acionar portas do microcontrolador, desviar um robô de obstáculos, acionar alarmes, etc. Neste tutorial ensinaremos a conectar o HC-SR04 ao Arduino.
O funcionamento do HC-SR04 (datasheet) se baseia no envio de sinais ultrassônicos pelo sensor, que aguarda o retorno (echo) do sinal, e com base no tempo entre envio e retorno, calcula a distância entre o sensor e o objeto detectado.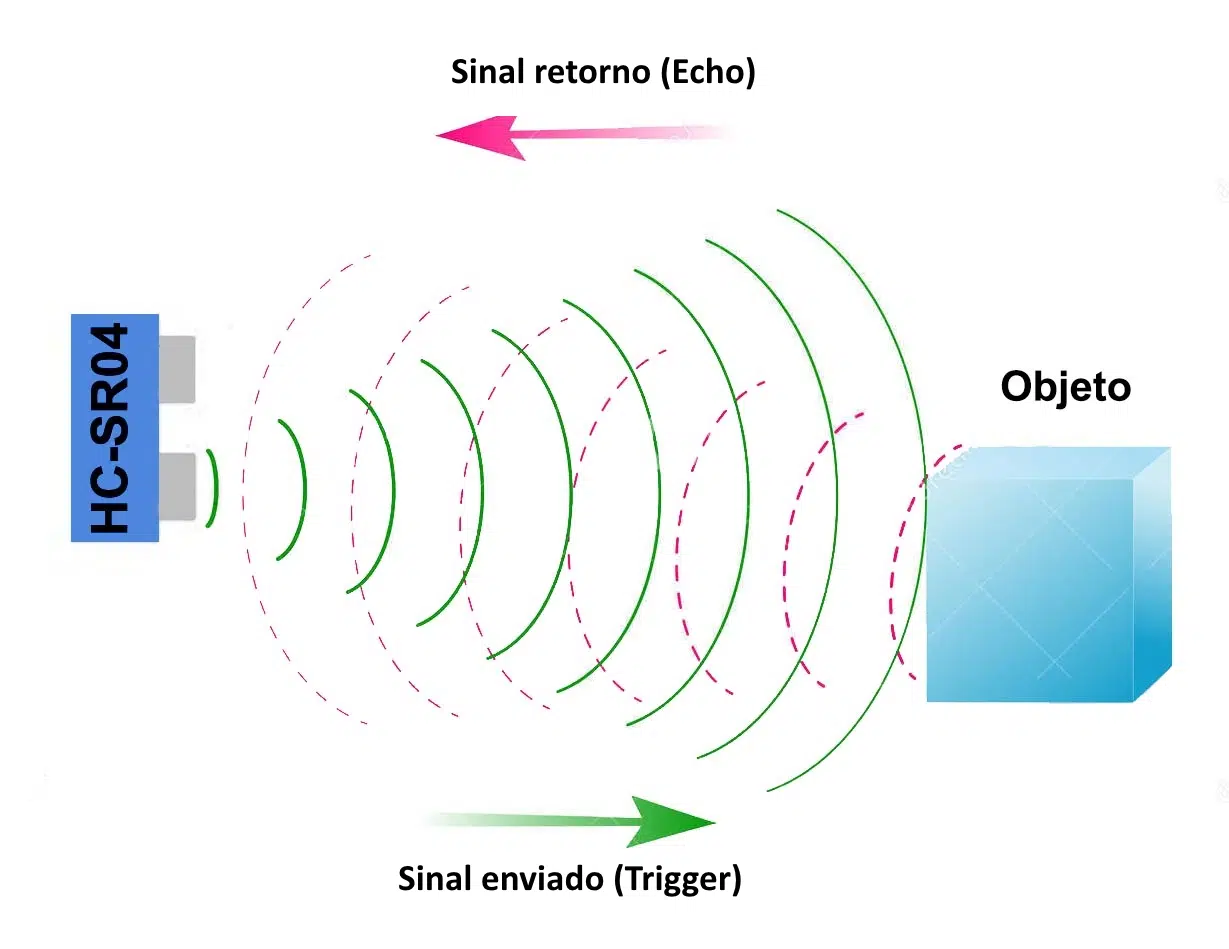
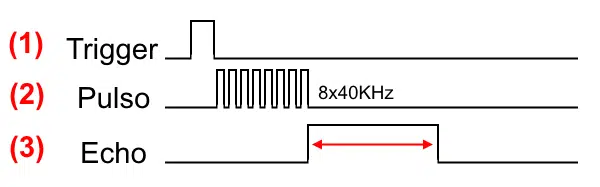
Primeiramente é enviado um pulso de 10µs, indicando o início da transmissão de dados. Depois disso, são enviado 8 pulsos de 40 KHz e o sensor então aguarda o retorno (em nível alto/high), para determinar a distância entre o sensor e o objeto, utilizando a equação Distância = (Tempo echo em nível alto * velocidade do som) /2
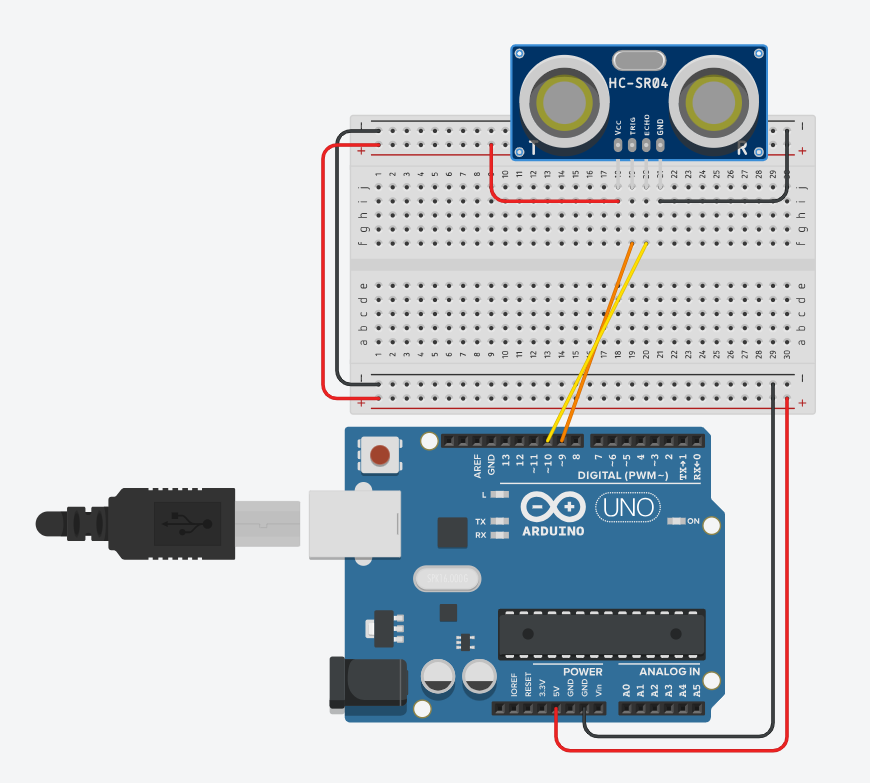
Conectando o Sensor HC-SR04 ao Arduino
A ligação do sensor ao Arduino no nosso programa vai utilizar, além dos pinos de alimentação, os pinos digitais 4 para o Trigger, e 5 para o Echo. A alimentação será feita pelo pino 5V do Arduino:
código adaptado de [2]
// C++ code
//
long readUltrasonicDistance(int triggerPin, int echoPin)
{
pinMode(triggerPin, OUTPUT); // Clear the trigger
digitalWrite(triggerPin, LOW);
delayMicroseconds(2);
// Sets the trigger pin to HIGH state for 10 microseconds
digitalWrite(triggerPin, HIGH);
delayMicroseconds(10);
digitalWrite(triggerPin, LOW);
pinMode(echoPin, INPUT);
// Reads the echo pin, and returns the sound wave travel time in microseconds
return pulseIn(echoPin, HIGH);
}
void setup()
{
Serial.begin(9600);
Serial.println("Iniciando Sensor");
}
void loop()
{
Serial.print("Distance: ");
Serial.println(0.01723 * readUltrasonicDistance(9, 10));
delay(10); // Delay a little bit to improve simulation performance
}Bloco
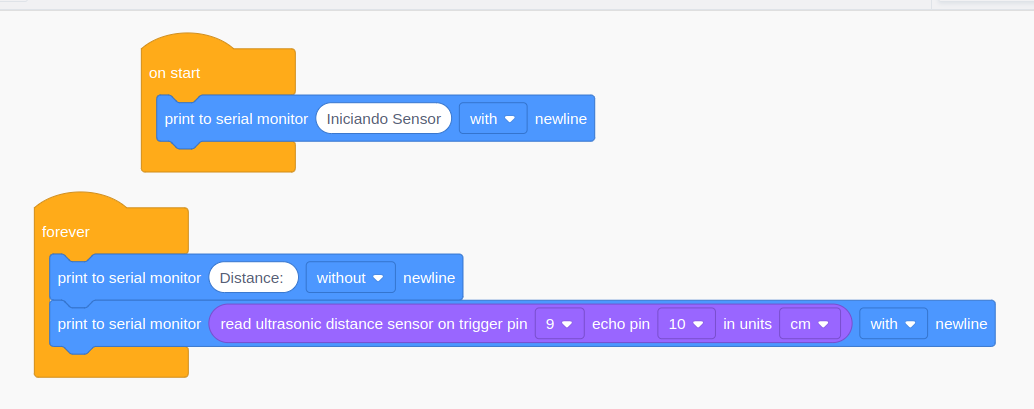
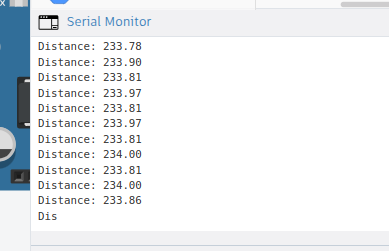
No programa todo o cálculo é feito por meio da biblioteca Ultrasonic. O sensor é inicializado nos pinos trigger e echo, e depois efetuamos a leitura dos dados do sensor, atribuindo às variáveis cmMsec e inMsec os valores das distâncias em centímetros e polegadas, respectivamente. Os dados são mostrados no serial monitor:
Exercício
Fazer o projeto do Tinkercad no Arduino e acender o led interno do arduino caso a distancia seja menor que 15cm.